
Università e tecnologia: i ricercatori pisani hanno presentato 'Walkman' a Los Angeles
Il team dell'Ateneo è stato l'unico italiano su 3 europei (e 25 mondiali) a partecipare alla 'Darpa Robotics Challenge' dell'Agenzia per la ricerca avanzata del dipartimento di difesa statunitense. Un grande risultato per il robot umanoide made in Pisa

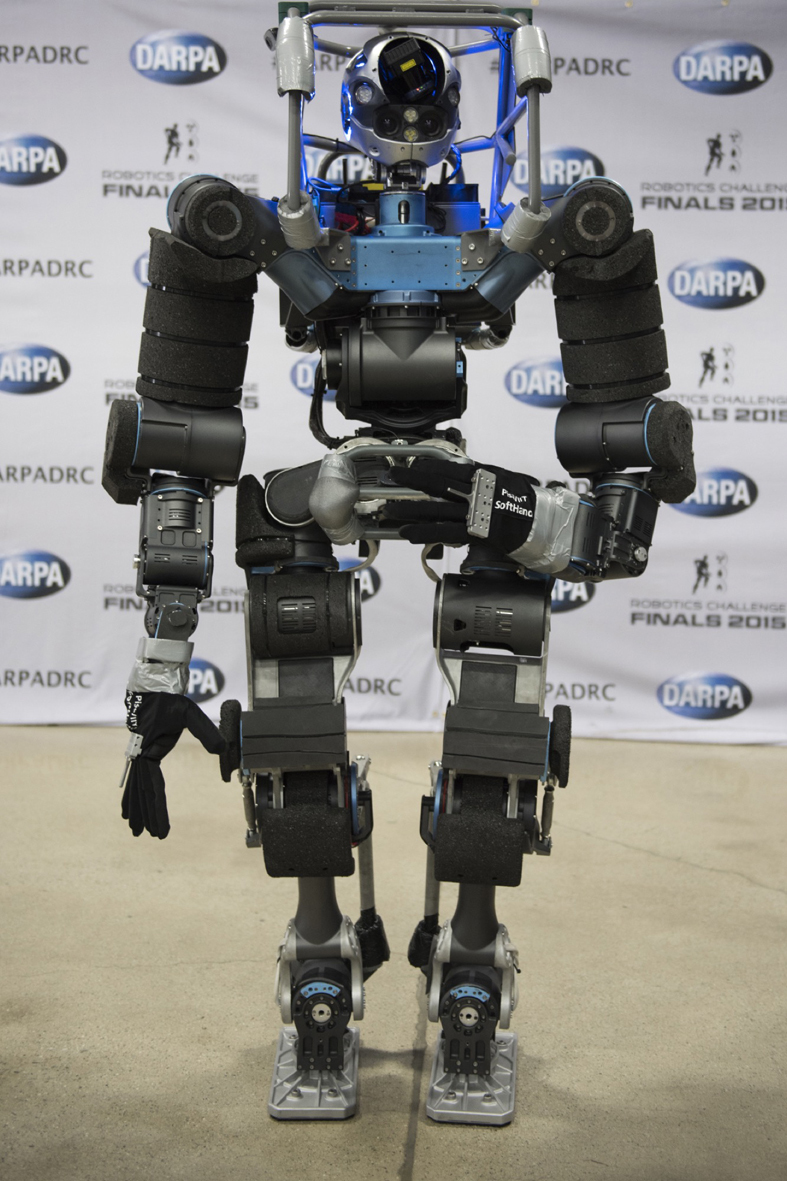
Un ragazzone alto 1,85 metri e pesante 100 chili capace di intervenire in caso di grave crisi nucleare. I ricercatori del Centro Piaggio dell'Università di Pisa insieme ai colleghi dell'Iit di Genova hanno progettato e costruito il robot umanoide 'Walkman', capace di camminare, aprire le porte, usare strumenti di lavoro, chiudere e aprire una valvola industriale: in breve in grado salvare la situazione in contesti di emergenza in cui un essere umano non può intervenire.
Il progetto è stato portato avanti dall'unico team italiano (su 3 europei) per la sfida fra robot promossa dall'Agenzia per la ricerca avanzata del dipartimento di difesa statunitense (Darpa), cioè la 'Darpa Robotics Challenge'. L'obiettivo dell'istituto era quello di definire gli standard tecnologici delle nuove macchine da usare in casi di disastri. Si sono quindi confrontate 25 squadre provenienti da Usa, Giappone, Corea del Sud, Europa, Hong Kong, Repubblica Popolare Cinese. 'Walkman' si è classificato diciassettesimo, ricevendo molti apprezzamenti da parte della giuria.
I ricercatori dell'Ateneo pisano hanno raccontato la loro esperienza in un incontro che si è tenuto oggi in rettorato. A presentarli c'era Paolo Ferragina, prorettore per la ricerca applicata e l'innovazione. Grande lavoro per i giovani ricercatori, accompagnati dai professori Antonio Bicchi e Lucia Pallottino. Il gruppo pisano ha infatti realizzato le mani del robot, un'evoluzione della 'Pisa-IIT Softhand' adattata ai task della gara. I programmatori hanno poi fatto l'interfaccia uomo-pilota. Sempre a Pisa è stato messo a punto il plannig, cioè che strategia deve usare lo strumento per fare le attività richieste, e una parte della progettazione meccanica.
 Questi i ricercatori con i rispettivi compiti:
Questi i ricercatori con i rispettivi compiti:
Alessandro Settimi (28 anni) ha sviluppato l'interfaccia di controllo remoto del robot, mediante cui vengono inviate le istruzioni che il robot deve eseguire. Alessandro è anche stato il pilota principale durante il Darpa Robotic Challenge ed è stato affiancato da altri cinque collaboratori all'interno del Pilot Team.
Mirko Ferrati (28 anni) ha sviluppato l'architettura software, coordinando lo sviluppo dei moduli sia di controllo che di teleoperazione. Inoltre ha sviluppato l'infrastruttura per la comunicazione tra robot e pilota. Durante la gara ha coordinato i piloti con i ragazzi del Field Team, che si occupavano del robot sul campo.
Corrado Pavan (28 anni) si è occupato di sviluppare gli algoritmi che controllano il robot ed eseguono le istruzioni ricevute dai piloti. Durante la gara Corrado come secondo pilota ha gestito le informazioni provenienti dal robot, come ad esempio le immagini 3D, e la visualizzazione degli oggetti manipolati dal robot.
Manuel Catalano (33 anni) si è occupato della progettazione meccanica e dello sviluppo dei sistemi di attuazione del robot, delle mani poliarticolate e della realizzazione del sottosistema di locomozione. Durante le fasi di gara è stato membro del Field Team, il team incaricato di gestire il robot sul campo di gara.
Manolo Garabini (31 anni) si è occupato della progettazione meccanica e dello sviluppo dei sistemi di attuazione del robot, del sottosistema di locomozione e dei sistemi di sensorizzazione di forza dei piedi. Durante le fasi di gara è stato membro del team di supporto e setup meccanico del robot.
Alberto Brando (35 anni) si è occupato della progettazione meccanica e dello sviluppo delle mani poliarticolate. Durante le fasi di gara è stato membro del team di supporto e setup meccanico del robot.
Andrea di Basco (27 anni) si è occupato dello sviluppo e della produzione delle mani poliarticolate, nonché dello sviluppo di componenti meccaniche riguardanti i sistemi di attuazione e locomozione.
Enrico Corvaglia (27 anni) ha sviluppato il software del modulo di controllo per il task di guida al Darpa.



